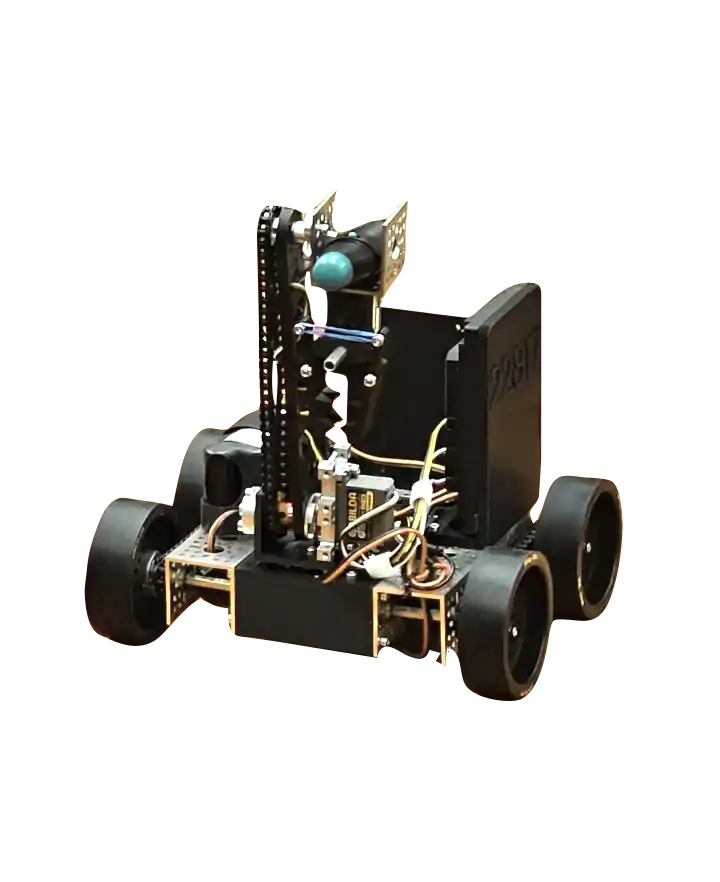
Drivetrain
Our robot was designed from the ground up to maximize agility as much as possible. With a simple differential drive (tank) design, it is very light and can accelerate quickly. When combined with 1150 RPM GoBilda motors, our robot could reach almost 10 km/h. We installed GoBilda Rhino wheels to maintain strong traction, ensuring our robot could navigate various terrains.
Intake
We designed a specialized intake for our specific purpose. The primary mechanism is the claw, which uses an elastic band to hold it open. To grab a ball, a cam is rotated to push the arms to close. Each side has spiky points on the inside, to ensure the balls are properly grabbed and do not fall. The claw is held by a virtual 4 bar driven by 2 servos, giving it 2 degrees of freedom: yaw and pitch. This unique arm design causes the claw to always be oriented towards the ground, allowing it to grab balls with ease.
Fire extinguishing
The robot features a fan attached to the top of the claw. Due to our virtual 4 bar design, the fan will always point forwards, allowing it to easily reach and extinguish the candles.
Sponsors

